
Experimental Physics and Industrial Control System
Hi,
I ran into the following problem: I have a PV (called DMOV) that makes a
1-0-1 transition which in some cases can be very fast (simulated by a
seq record for testing). I'd like to reset another PV (called
doneMovingGate_) to 1 when the 0-1 transition happens.
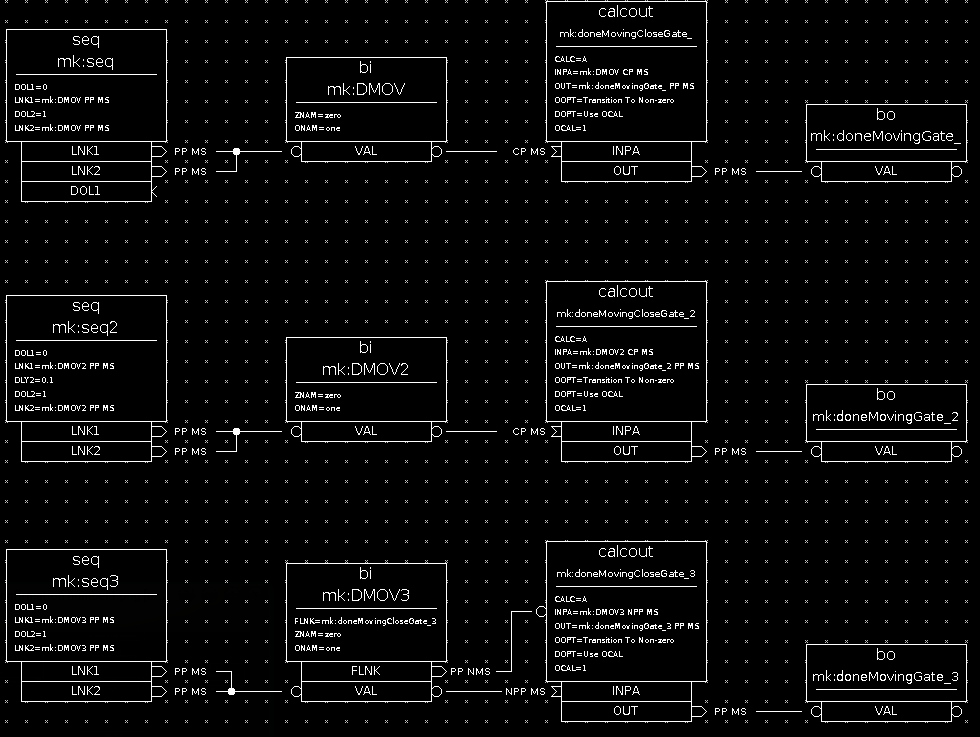
Here is how I tried to implement that (cf. screenshot of the VDCT screen):
1. Using a calcout record that has its input CP-linked to DMOV. => The
calcout record processes twice for each 1-0-1 transition but it doesn't
reset doneMovingGate_. I guess this happens because for some reason it
reads 1 all the time.
2. To make sure I use the calcout record correctly I increased the
length of the 0 state to 0.1 seconds. => Everything works as expected
(doneMovingGate_2 is reset to 1).
3. I put everything into the same lock set by using a FLNK + NPP instead
of a CP link. => Everything works as expected (doneMovingGate_3 is reset
to 1).
Now my question is: Why does the calcout record miss the 0 while my
camonitor (which also connects via Channel Access) gets the 1-0-1
transition reliably? As far as I can see from biRecord.c
db_post_events() is issued right before the forward links are processed.
So if it works with forward links (case #3 from above) why doesn't it
with a CP link (case #1)? Is this some sort of a race condition?
Any help is greatly appreciated
Martin
P.S.: $ uname -a
Linux konrad-linuxlap 3.8.0-30-generic #44-Ubuntu SMP Thu Aug 22
20:52:24 UTC 2013 x86_64 x86_64 x86_64 GNU/Linux
record(seq, mk:seq) {
field(DOL1, "0")
field(LNK1, "mk:DMOV PP MS")
field(DOL2, "1")
field(LNK2, "mk:DMOV PP MS")
}
record(bi, mk:DMOV) {
field(ZNAM, "zero")
field(ONAM, "one")
}
record(calcout, mk:doneMovingCloseGate_) {
field(CALC, "A")
field(INPA, "mk:DMOV CP MS")
field(OUT, "mk:doneMovingGate_ PP MS")
field(OOPT, "Transition To Non-zero")
field(DOPT, "Use OCAL")
field(OCAL, "1")
}
record(bo, mk:doneMovingGate_) {
}record(seq, mk:seq2) {
field(DOL1, "0")
field(LNK1, "mk:DMOV2 PP MS")
field(DLY2, "0.1")
field(DOL2, "1")
field(LNK2, "mk:DMOV2 PP MS")
}
record(bi, mk:DMOV2) {
field(ZNAM, "zero")
field(ONAM, "one")
}
record(calcout, mk:doneMovingCloseGate_2) {
field(CALC, "A")
field(INPA, "mk:DMOV2 CP MS")
field(OUT, "mk:doneMovingGate_2 PP MS")
field(OOPT, "Transition To Non-zero")
field(DOPT, "Use OCAL")
field(OCAL, "1")
}
record(bo, mk:doneMovingGate_2) {
}record(seq, mk:seq3) {
field(DOL1, "0")
field(LNK1, "mk:DMOV3 PP MS")
field(DOL2, "1")
field(LNK2, "mk:DMOV3 PP MS")
}
record(bi, mk:DMOV3) {
field(FLNK, "mk:doneMovingCloseGate_3")
field(ZNAM, "zero")
field(ONAM, "one")
}
record(calcout, mk:doneMovingCloseGate_3) {
field(CALC, "A")
field(INPA, "mk:DMOV3 NPP MS")
field(OUT, "mk:doneMovingGate_3 PP MS")
field(OOPT, "Transition To Non-zero")
field(DOPT, "Use OCAL")
field(OCAL, "1")
}
record(bo, mk:doneMovingGate_3) {
}Attachment:
screenshot VDCT.png
Description: screenshot VDCT.png
- Replies:
- Re: race condition with calcout & CA input links? Andrew Johnson
- Navigate by Date:
- Prev:
RE: Use element of waveform as input to ai record Emmanuel Mayssat
- Next:
Re: motor record: soft motor & DMOV Konrad, Martin
- Index:
1994
1995
1996
1997
1998
1999
2000
2001
2002
2003
2004
2005
2006
2007
2008
2009
2010
2011
2012
<2013>
2014
2015
2016
2017
2018
2019
2020
2021
2022
2023
2024
2025
- Navigate by Thread:
- Prev:
RE: Use element of waveform as input to ai record Emmanuel Mayssat
- Next:
Re: race condition with calcout & CA input links? Andrew Johnson
- Index:
1994
1995
1996
1997
1998
1999
2000
2001
2002
2003
2004
2005
2006
2007
2008
2009
2010
2011
2012
<2013>
2014
2015
2016
2017
2018
2019
2020
2021
2022
2023
2024
2025
{kind=link}