Experimental Physics and
Industrial Control System
| 1994 1995 1996 1997 1998 1999 2000 2001 2002 2003 2004 2005 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016 2017 <2018> 2019 2020 2021 2022 2023 2024 2025 2026 | Index | 1994 1995 1996 1997 1998 1999 2000 2001 2002 2003 2004 2005 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016 2017 <2018> 2019 2020 2021 2022 2023 2024 2025 2026 |
| <== Date ==> | <== Thread ==> |
|---|
| Subject: | question on architecture of epics and opc |
| From: | "=?gb18030?b?s8nN/rvG5a0=?=" <[email protected]> |
| To: | "=?gb18030?b?dGVjaC10YWxr?=" <[email protected]> |
| Date: | Fri, 14 Sep 2018 09:51:21 +0800 |
Hi, TechTalk,
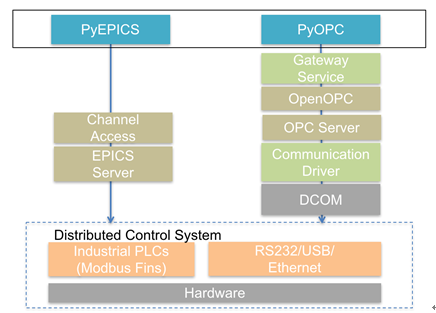
Here I have a system architecture block showed as below.
Background: Last week I set up an environment consists of epics, python, s7nodave, which I can talk to PLC(siemens 1200). I use wxpython to generate a GUI to turn on a light of PLC, also I use django framework to generate a web page, in which I can control a light of PLC by clicking a button. The environment is in Ubantu.
1, My first question is, according to this function block, there are two parallel methods to communicate with hardware. But, why need OPC approach, since I can talk to PLC without OPC? What is the difference between the method I use and OPC?
2, My second question is: the hardware in the bottom layer, is a serial of PLCs. Manufacturer of these PLCs offers a DLL file, which is a API of these PLCs. Does that mean I can only build the whole system in windows OS but not Linux? Since DLL is a concept of windows. Also, OPC is also a concept of windows but not Linux.
3, Last, can you comment on the system block below? Anything helps me to get more clear about it is welcome.
Thanks a lot ^_^ ^_^ ^_^
------------------
Ying Huang
Chengwei Lab&Engineering Company
No1 Xiantong Street, Youxian Area, Mianyang City, Sichuan Province, China
86 0816 2967213
- Navigate by Date:
- Prev: quadEM R9-2 now available Mark Rivers
- Next: PCAS 4.13.2 available Ralph Lange
- Index: 1994 1995 1996 1997 1998 1999 2000 2001 2002 2003 2004 2005 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016 2017 <2018> 2019 2020 2021 2022 2023 2024 2025 2026
- Navigate by Thread:
- Prev: quadEM R9-2 now available Mark Rivers
- Next: PCAS 4.13.2 available Ralph Lange
- Index: 1994 1995 1996 1997 1998 1999 2000 2001 2002 2003 2004 2005 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016 2017 <2018> 2019 2020 2021 2022 2023 2024 2025 2026
· Distributions · Download · Documents · Links · Licensing ·